Author: Zach Christoff
Lab Partner: Daniel Baka
Date: 11/23/15
Lab Partner: Daniel Baka
Date: 11/23/15
Purpose
The purpose of this lab is to investigate the effect changes in variables (in this case, velocity) have on centripetal force using measured and calculated values
Theory
This free body diagram represents the pendulum and the forces acting on it. While it does not go in a complete circle, it follows a circular path. Using Newton's Third Law, I can come up with the equation for centripetal force (left side being measured and right side being calculated):

|

|
Experimental Technique

|
Using a photogate and Data Studio, a pendulum (left) was set up. Velocity and force was measured in Data Studio based on how the pendulum went through the photogate. Important: the sensor must be zeroed so that results are accurate.
|

|
A mass attached at the end of the rod is what the photogate measured. The mass had to be perfectly centered at rest in order for measurements to be most accurate.
|

|
To collect data, the smart tool in Data Studio must be used to find the velocity at different points along the graph. To vary velocity used in my calculations, I could either find different velocity points along the graph or drop the pendulum from different heights. Either way would have gotten me different velocities.
|
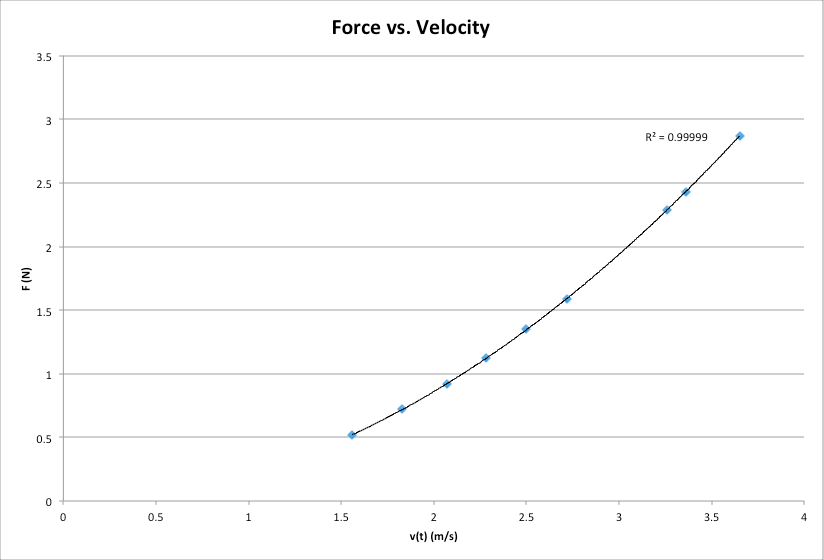
Data
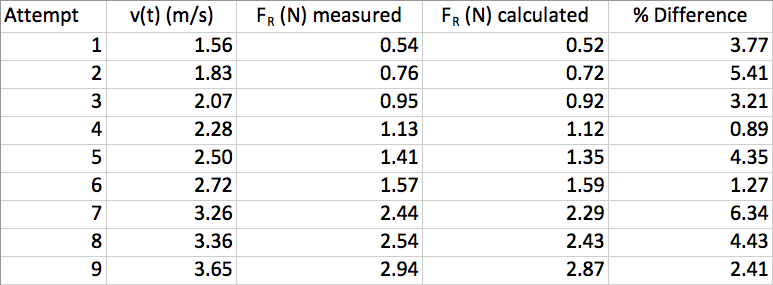
The data above shows that changes in velocity do not present a correlation with percent difference. However, the graph represents a nearly perfect correlation with the calculated and velocity. A graph with the measured force would not show a correlation like this because of some error in the force sensor.
|
|
Analysis
|
Calculated centripetal force:
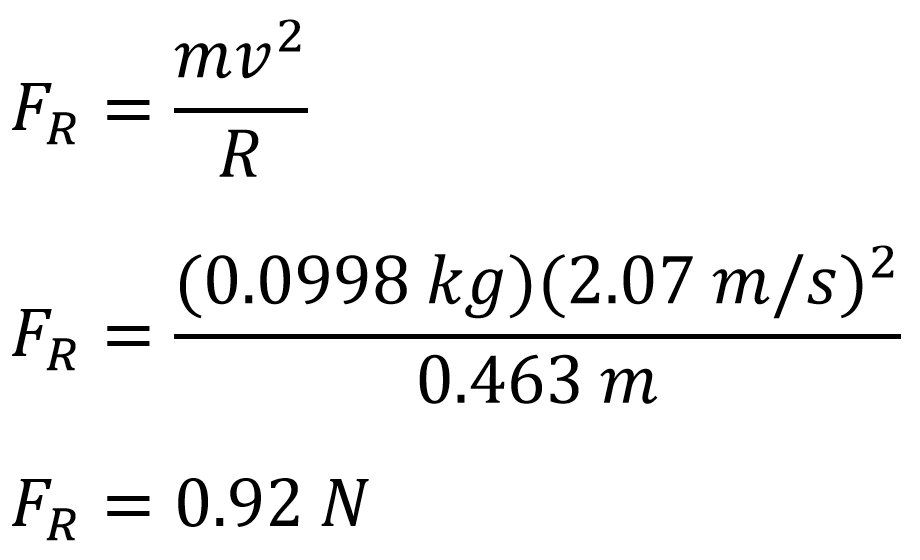
|
Percent difference:

|
Conclusion
The factors that affect centripetal force on the pendulum bob are: flag length, mass, and velocity. For my lab, I varied velocity to investigate its factor on centripetal force while keeping the other factors constant. The % differences between measured and calculated are due to many factors. For instance, the pendulum does not completely stay on one axis, it fluctuates back and forth into another axis. Also, the photogate must be lined up perfectly in the middle of the pendulum's center, which is impossible to do because of parallax error, which also contribute to error in measurements of the flag length. The photogate also has some minor error in its measurement of velocity.
However, the factors that contributed to error the most were the location of the center of mass and the sensitivity of the force sensor. For my lab, I did not take into account the mass of the rod holding the mass, which skews results. Also, the force sensor measure +/- 50 Newtons, and our measurements were in the small single digit amounts; this results in results that are not as accurate.
In order to improve the outcome of this investigation, the rod's mass could be taken into consideration, which would result in a different center of mass. Also, a more precise force sensor would give more accurate force measurements, which would result in better percent differences.
However, the factors that contributed to error the most were the location of the center of mass and the sensitivity of the force sensor. For my lab, I did not take into account the mass of the rod holding the mass, which skews results. Also, the force sensor measure +/- 50 Newtons, and our measurements were in the small single digit amounts; this results in results that are not as accurate.
In order to improve the outcome of this investigation, the rod's mass could be taken into consideration, which would result in a different center of mass. Also, a more precise force sensor would give more accurate force measurements, which would result in better percent differences.
References
Giancoli, Douglas C. Physics: Principles with Applications. 5th ed. Upper Saddle River, N.J.: Prentice Hall, 1998. Print.
